-

南京全控航空科技有限公司
主营:自由度运动平台,虚拟模拟仿真,VR虚拟设备 - 18805154797

南京全控航空科技有限公司
主营:自由度运动平台,虚拟模拟仿真,VR虚拟设备 7
7
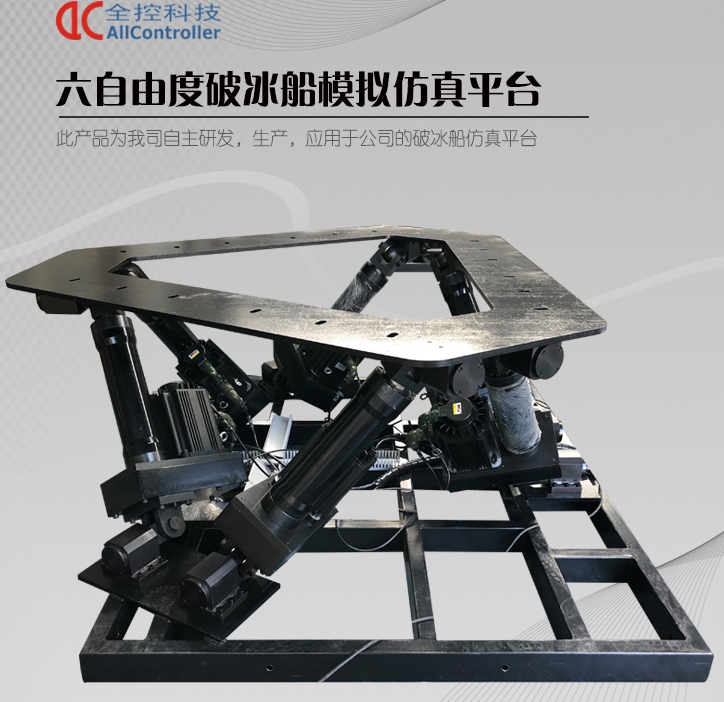
六自由度并联运动平台由机械本体和伺服控制系统组成。机械本体设计的优劣直接决定了平台工作空间、带载能力、运动稳态精度等性能,而良好的伺服控制系统设计则是确保平台达到其设计性能指标的基础,甚至能够在一定程度上提高平台的运动性能。并联平台的运动学分析是并联机构研究的基础,更是平台运动控制的基础。运动学问题分为运动学反解及正解两方面的问题。通过运动学反解可以求得给定动平台位置姿态所对应的各个电动缸长度值,从而实现运动控制。
六个自由度的运动,即:俯仰、侧倾、横摆三个方向的转动以及纵向、横向、垂向三个方向的直线运动,可用于模拟车辆(船艇)在道路或冰道上行驶状况。该虚拟仿真实验平台以六自由度并联机构作为驾驶舱操纵仿真系统,能够实现驾驶舱对仿真图形的快速、稳定的反映,通过模拟驾驶舱和计算机实时生成汽车行驶过程中的虚拟视境、音响效果和运动仿真等驾驶环境, 以视景仿真管理软件实现虚拟环境的“沉浸感、交互性”特性,为驾驶人提供了在坡路、颠簸路面等以及车辆加减速、转向、侧滑时的运动临场感。对汽车运动性能控制系统进行仿真、评价、预测,对于船舶的设计开发具有重要而现实的意义。